इलेक्ट्रिक मोटर्स
यह एक AI उत्पन्न अनुवाद है, कृपया ध्यान से सामग्री के माध्यम से जाएं
अनुवाद में किसी भी त्रुटि के मामले में कृपया मुझे उसी के लिए प्रतिक्रिया प्रदान करें
- इलेक्ट्रिक मोटर्स विद्युत ऊर्जा को यांत्रिक घूर्णी ऊर्जा में परिवर्तित करते हैं
- जैसा कि नाम का अर्थ है, वे गति बनाने के लिए विद्युत इनपुट का उपयोग करते हैं
- विद्युत और चुंबकीय बलों के बीच बातचीत का उपयोग करते हुए, वे घूर्णन और गैर-घूर्णन घटकों में हेरफेर करते हैं
- वे मैग्नेट, वाइंडिंग या ठोस वर्गों का उपयोग कर सकते हैं
- एक मोटर के घूर्णन घटक को रोटर कहा जाता है
- एक मोटर के स्थिर घटक को स्टेटर कहा जाता है
- यदि रोटर आंतरिक पक्ष पर मौजूद है, तो इसे एक ***इन-रनर मोटर कहा जाता है ***
- यदि रोटर मोटर की बाहरी परिधि के पास मौजूद है, तो इसे ***आउट-रनर मोटर कहा जाता है ***
5 प्रकार के मोटर्स हैं जिन पर हम चर्चा करेंगे,
1। [[#ac 3 चरण प्रेरण मोटर]]
2। [[#BLDC मोटर]]
3। [[#Permanent चुंबक सिंक्रोनस मोटर (PMSM)]]
4। [[#Synchronous अनिच्छा मोटर (SYNRM)]]
5। [[#Switched अनिच्छा मोटर (SRM)]]
एसी 3 चरण प्रेरण मोटर

- लोरेंट्ज़ सिद्धांत के आधार पर विद्युत चुम्बकीय प्रेरण के सिद्धांत पर काम करता है
- लोरेंट्ज़ फोर्स, बल एक चार्ज कण क्यू पर एक विद्युत क्षेत्र ई और चुंबकीय क्षेत्र बी के माध्यम से वेलोसिटी वी के साथ चल रहा है। चार्ज कण पर पूरे विद्युत चुम्बकीय बल एफ को लोरेंट्ज़ बल कहा जाता है (डच भौतिक विज्ञानी हेंड्रिक ए। लोरेंट्ज के बाद) और द्वारा दिया जाता है और इसे दिया जाता है।
F = qE + qv × B
-
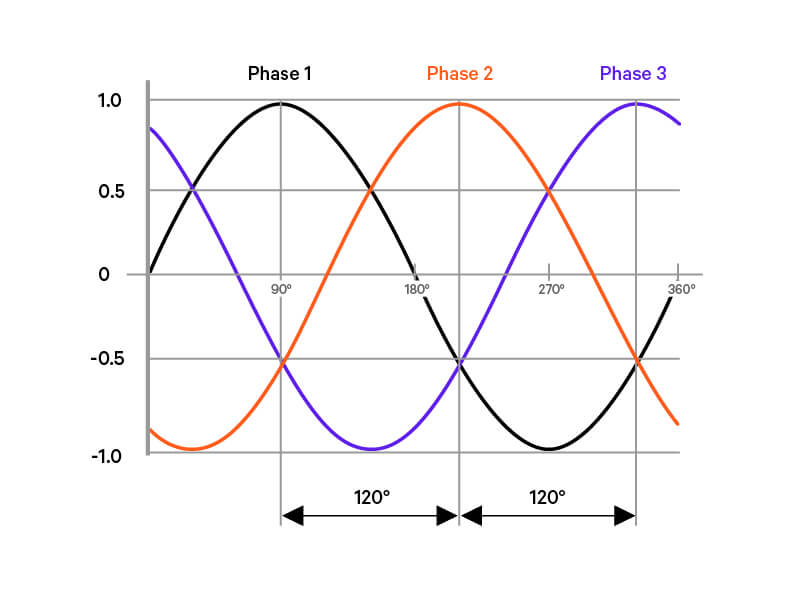
स्टेटर में 3 जोड़े वाइंडिंग हैं
-
उनमें से प्रत्येक को अलग -अलग चरण एसी आपूर्ति के साथ सक्रिय किया जाता है, प्रत्येक चरण 120 the चरण से दूसरे से बाहर हैं।
-
यह सुनिश्चित करता है कि एक समय में 1 चरण पीक +/- वी आयाम पर है, अन्य 2 मध्यवर्ती स्तरों पर हैं
-
यह सुनिश्चित करता है कि केवल 1 घुमावदार जोड़ी एक समय में पूरी तरह से सक्रिय हो जाएगी।
-
स्टेटर फील्ड वाइंडिंग एक चुंबकीय क्षेत्र उत्पन्न करेगा जो गिलहरी पिंजरे में वर्तमान के विद्युत चुम्बकीय प्रेरण का कारण होगा
-
गिलहरी के पिंजरे एक घुमावदार की तरह काम करेंगे क्योंकि प्रत्येक रॉड के सिरों को अंत प्लेटों तक छोटा कर दिया जाता है
-
यह गिलहरी पिंजरे में वर्चुअल वाइंडिंग जोड़े बनाएगा जिसमें करंट प्रेरित होगा
-
जब एक कंडक्टर के माध्यम से वर्तमान प्रवाह होता है, तो उस कंडक्टर के अंदर एक चुंबकीय क्षेत्र स्थापित किया जाएगा
-
इसलिए, गिलहरी पिंजरे के अंदर प्रेरित वर्तमान का कारण एक चुंबकीय क्षेत्र को गिलहरी के पिंजरे में भी स्थापित किया जाएगा
-
यह चुंबकीय क्षेत्र स्टेटर वाइंडिंग की ओर आकर्षित होगा, जो गति की दिशा में सक्रिय हैं
-
गिलहरी के पिंजरे में स्टेटर वाइंडिंग का पालन करना शुरू हो जाएगा
-
यह हमेशा अनुसरण करेगा और कभी भी स्टेटर एनर्जाइज़ेशन के साथ सिंक में नहीं पहुंचेगा, इसलिए एसी इंडक्शन मोटर्स में हमेशा बिना किसी लोड की स्थिति में कुछ पर्ची होगी।
-
चूंकि वर्तमान मोटर में प्रेरित है, इसलिए एसी इंडक्शन मोटर का नाम लिया गया है
-
गिलहरी पिंजरे द्वारा उत्पन्न चुंबकीय क्षेत्र को मजबूत करने के लिए, एक चुंबकीय कोर को अंदर से डाला जाता है, जो कि संचालन में रहते हुए गिलहरी केज के चुंबकीय क्षेत्र द्वारा अस्थायी रूप से चुंबकित किया जाता है
-
यह अधिक टोक़ उत्पन्न करेगा और बिजली की आवश्यकता को कम करेगा, जिससे मोटर की दक्षता बढ़ जाएगी
-
एडी करंट के कारण नुकसान को कम करने के लिए, आयरन कोर का क्रॉस सेक्शनल क्षेत्र कोर को लोहे की डिस्क/प्लेटों की एक श्रृंखला में विभाजित करके कम किया जाता है।
-
एसी मोटर्स को काम करने के लिए स्थिति सेंसर की आवश्यकता नहीं होती है क्योंकि मोटर गतिशील रूप से लोड की स्थिति के लिए अनुकूल होगा क्योंकि रोटर स्टेटर वाइंडिंग को सक्रिय होने का पालन करने की कोशिश करता है।
-
आमतौर पर, अनुप्रयोगों को निरंतर गति आउटपुट की आवश्यकता होती है। पूर्व: पंप, कताई और पीस मिलों, एट
-
यदि गति नियंत्रण की आवश्यकता होती है, तो परिवर्तनीय आवृत्ति ड्राइव (Variable Frequency Drive - VFD) का उपयोग किया जाता है।
-
इस मॉड्यूल में बाद के बिंदु पर इस पर विस्तार से चर्चा की जाएगी
BLDC मोटर

- BLDC ब्रश डीसी मोटर्स का एक विकास है
- जैसा कि नाम से पता चलता है, वे डीसी पावर पर विशेष रूप से काम करते हैं
- ब्रश डीसी मोटर्स में, कम्यूटेटर ब्रश समय की अवधि में पहनते हैं
- BLDC ने इलेक्ट्रॉनिक्स का उपयोग करके कम्यूटेशन को अंजाम देकर ब्रश के उपयोग को समाप्त कर दिया
- यह चुंबकीय ध्रुवों के आकर्षण और प्रतिकर्षण के चुंबकीय सिद्धांत पर काम करता है
- रोटर पर स्थित स्थायी मैग्नेट हैं।
- स्टेटर पर चरण वाइंडिंग मौजूद हैं
- स्टेटर में कई घुमावदार जोड़े हैं। वे व्यवस्थित रूप से रोमांचक हैं, जैसे कि, एक समय में, घुमाव
- डंडे (एन-एस/एस-एन) के विपरीत यह आकर्षण चुंबक के करीब घुमावदार कदम के रूप में एक टॉर्क उत्पन्न करेगा
- एक बार जब वाइंडिंग चुंबक तक पहुंच जाती है, तो टोक़ शून्य हो जाता है, इस पल में, घुमावदार को डिपोवर किया जाता है और अगली घुमावदार इसे चुंबक की यात्रा करने के लिए प्रेरित किया जाता है
- श्रृंखला में 2 वाइंडिंग को जोड़कर, कोई ध्रुवों (एन-एन/एस-एस) द्वारा बनाई गई प्रतिकारक बलों का लाभ उठा सकता है, जो चुंबकीय ध्रुव से घुमावदार को दूर/पीछे धकेल देगा।
- यह घुमावदार ऊर्जा को सरल बना देगा, क्योंकि एक समय में केवल 1 सिग्नल को पावर मोटर में भेजा जाना है
- यह टॉर्क को भी बढ़ावा देगा, और टॉर्क आउटपुट वक्र को चिकना करेगा।
- प्रत्येक चरण घुमावदार की सक्रियता नियंत्रक द्वारा किया जाता है, ताकि लोड के साथ सही ढंग से वाइंडिंग को सक्रिय करने के लिए, एक स्थिति संवेदन प्रतिक्रिया प्रणाली को शामिल किया जाना है
- इस उद्देश्य के लिए एक हॉल सेंसर का उपयोग किया जाता है, यह रोटर की स्थिति को नियंत्रक के लिए रिले करेगा जो तदनुसार गति को बढ़ाकर/कम करके/कम करके आउटपुट को समायोजित करेगा।
- वोल्टेज पल्स आयाम और वर्तमान आउटपुट को संशोधित करके गति नियंत्रण प्राप्त किया जाता है
स्थायी चुंबक सिंक्रोनस मोटर (PMSM)

- वे रोटर और स्टेटर के बीच समकालिकता सुनिश्चित करके काम करते हैं।
- उनके बीच 0 पर्ची होगी, और रोटर और स्टेटर दोनों एक ही गति को आगे बढ़ाएंगे - जो कि सिंक्रोनस स्पीड (
) है - एक एसी कॉइल स्टेटर पर मौजूद है जो एक घूर्णन चुंबकीय क्षेत्र उत्पन्न करता है
- रोटर पर, स्थायी मैग्नेट रखा जाता है, इसलिए नाम स्थायी चुंबक सिंक्रोनस मोटर
- एक स्थायी चुंबक के बजाय, कोई भी डीसी उत्तेजना के साथ एक दायर घुमावदार का उपयोग कर सकता है, यह एक स्थायी चुंबक की तरह भी व्यवहार करेगा क्योंकि क्षेत्र स्थिर है
- रोटर के अंदर स्थायी चुंबक क्षेत्र स्टेटर में एसी घुमावदार उत्तेजना द्वारा उत्पन्न चुंबकीय क्षेत्र की ओर आकर्षित होता है।
- रोटर चुंबकीय रूप से स्टेटर वाइंडिंग में घूर्णन चुंबकीय क्षेत्र के साथ खुद को सिंक्रनाइज़ करेगा, इसलिए सिंक्रोनस मोटर कहा जाता है
- ये मोटर्स स्वाभाविक रूप से स्वयं शुरू नहीं कर रहे हैं
- इसलिए, उन्हें प्रतिक्रिया और नियंत्रण के लिए एक स्थिति सेंसर की आवश्यकता होगी
डीसी वाइंडिंग रोटर सेल्फ स्टार्टिंग
- डीसी वाइंडिंग रोटर के साथ एक सिंक्रोनस मोटर को रोटर में एक गिलहरी पिंजरे को जोड़कर आत्म शुरू करने के लिए बनाया जा सकता है
- प्रारंभिक शुरुआती चरण के दौरान, डीसी वाइंडिंग उत्साहित नहीं हैं।
- इस प्रकार, एसी फील्ड वाइंडिंग गिलहरी के पिंजरे में वर्तमान को प्रेरित करते हैं और मोटर एक एसी इंडक्शन मोटर की तरह घूमना शुरू कर देता है
- जैसा कि हम जानते हैं, एसी इंडक्शन मोटर्स में हमेशा कुछ मात्रा में पर्ची होती है, वह है रोटर हमेशा स्टेटर वाइंडिंग उत्तेजना से पीछे रहती है
- रोटर की गति सिंक्रोनस स्पीड से कम है (
) - इसलिए, एक बार मोटर अधिकतम गति तक पहुंचने के बाद, रोटर और स्टेटर के बीच पर्ची/लोड कोण जितना संभव हो उतना छोटा हो जाता है, इस पल में, डीसी वाइंडिंग चार्ज किया जाता है।
- यह रोटर को अब बिना किसी पर्ची की स्थिति प्राप्त करने के लिए पूरी तरह से स्टेटर के साथ सिंक्रनाइज़ करने का कारण बनता है।
- इस स्थिति में, चूंकि गिलहरी केज बार स्टेटर उत्तेजना के साथ सिंक में आगे बढ़ेगा, इसलिए सलाखों में अधिक वर्तमान प्रेरित नहीं है।
- इसलिए डीसी वाइंडिंग रोटर की कताई गति के कार्य को पूरी तरह से ले लेता है।
PMSM स्टार्टिंग
- डीसी वाइंडिंग के विपरीत, कोई भी स्थायी मैग्नेट चालू/बंद नहीं कर सकता है, इसलिए इस मोटर को शुरू करने के लिए एक और तरीका तैयार किया जाना है
- सिंक्रोनस स्पीड (
) पर एसी फील्ड उत्तेजना चुंबकीय रोटर के लिए बहुत तेज है और सिंक्रनाइज़ करने के लिए। - एसी क्षेत्र का चुंबकीय ध्रुव पहले ही बीत चुका है और विपरीत ध्रुव चुंबक के बगल में आया है
- यह इसके वजन के कारण रोटर की जड़ता के कारण होता है
- यदि एसी फील्ड वाइंडिंग को पर्याप्त रूप से धीमा किया जाना था, तो चुंबकीय रोटर को घूर्णन एसी फील्ड के साथ सिंक्रनाइज़ करने के लिए पर्याप्त समय होगाउत्तेजना
- एक बार, रोटर सिंक्रनाइज़ करता है और स्टेटर के समान गति तक पहुंचता है, गति को अब धीरे -धीरे बढ़ाया जा सकता है जब तक कि अधिकतम गति तक पहुंच जाए
- एसी फील्ड वाइंडिंग स्पीड को नियंत्रित करने और अलग करने के लिए, एक परिवर्तनीय आवृत्ति ड्राइव (Variable Frequency Drive - VFD) का उपयोग किया जाता है।
सिंक्रोनस अनिच्छा मोटर (SYNRM)

- चुंबकीय [[#Reluctance]] के सिद्धांत पर काम करता है।
- जैसा कि नाम से पता चलता है, ये मोटर्स भी सिंक्रोनस हैं।
- स्टेटर में, एसी फील्ड वाइंडिंग उत्तेजना द्वारा एक घूर्णन चुंबकीय क्षेत्र का उत्पादन किया जाएगा
- रोटर में एक गुच्छा में एक साथ स्टैक्ड शीट की एक श्रृंखला होगी
- रोटर पर कटआउट का डिज़ाइन ऐसा है कि उनके पास 2 अलग -अलग स्थान हैं, अधिकतम फ्लक्स घनत्व के साथ 1 स्थिति और दूसरा न्यूनतम फ्लक्स घनत्व के साथ
- यह सुनिश्चित करता है कि रोटर सिंक्रनाइज़ेशन में कताई करते समय अंतराल या लॉक नहीं होगा
- रोटर को एसी वाइंडिंग द्वारा उत्पन्न चुंबकीय क्षेत्र के साथ कम से कम अनिच्छा की स्थिति मिलेगी और इसके साथ एक ही गति से आगे बढ़ें, अर्थात्, सिंक्रोनस स्पीड (
) पर - यह मोटर स्वयं भी शुरू नहीं है और इसलिए 0 से अधिकतम आरपीएम तक रोटर को धीरे -धीरे गति देने के लिए एक वीएफडी का उपयोग करता है
- चूंकि ये मोटर्स स्वाभाविक रूप से स्वयं शुरू नहीं करते हैं, इसलिए उन्हें प्रतिक्रिया और नियंत्रण के लिए एक स्थिति सेंसर की आवश्यकता होगी
स्विचेड अनिच्छा मोटर (SRM)
- [[#Reluctance]] सिद्धांत के अनुसार, चुंबकीय प्रवाह हमेशा न्यूनतम अनिच्छा पथ के माध्यम से प्रवाह करने की कोशिश करता है, जैसे कि वर्तमान न्यूनतम प्रतिरोध पथ में प्रवाह करने की कोशिश करता है।
- इसलिए स्टेटर पोल और रोटर डंडे के बीच अनिच्छा विविध है, और रोटर न्यूनतम अनिच्छा अक्ष में खुद को संरेखित करने की कोशिश करता है। इस प्रक्रिया में, एक चर अनिच्छा टोक़ का उत्पादन किया जाता है, जो रोटर को घुमाता है।
- रोटर एक ठोस कोर है जिसमें पोल बनाने के लिए स्लॉट्स कट जाते हैं
- स्टेटर में फील्ड वाइंडिंग होती है जो चालू और बंद हो जाती है और साथ ही पोलरिटी को रिवर्स डंडे पर बार -बार बदल दिया जाता है।
- एक विशिष्ट SRM में एक 6 पोल स्टेटर और 4 पोल रोटर होगा, यह सुनिश्चित करता है कि एक समय में, केवल 1 अनिच्छा स्थिति है
- एक बार जब एक घुमावदार जोड़ी स्टेटर में सक्रिय हो जाती है,
- जैसे ही रोटर उस स्थिति तक पहुंचता है, अनिच्छा टोक़ शून्य हो जाता है क्योंकि रोटर ने कम से कम अनिच्छा की अपनी स्थिति हासिल कर ली है
- रोटर की निरंतर गति के लिए, इस बिंदु पर एक नई घुमावदार जोड़ी को सक्रिय किया जाता है और वर्तमान जोड़ी डी-एनर्जेटेड है
- यह रोटर के अंदर एक नई न्यूनतम अनिच्छा स्थिति बनाएगा
- चूंकि यह मोटर स्वाभाविक रूप से स्वयं शुरू नहीं है, इसलिए इसे प्रतिक्रिया और नियंत्रण के लिए एक स्थिति सेंसर की आवश्यकता होगी
- एक नियंत्रक इनपुट और लोड स्थितियों के आधार पर मोटर को SPEED और इनपुट सिग्नलिंग को विनियमित करेगा
- चूंकि एक स्विचिंग सर्किट ध्रुवीयता को उलट देता है, इसलिए इस मोटर को एक डीसी आपूर्ति प्रदान की जाती है।
- वोल्टेज और वर्तमान पल्स आयाम को संशोधित करके, गति को कम किया जा सकता है
परिवर्तनीय आवृत्ति ड्राइव (Variable Frequency Drive - VFD)
- एसी फील्ड वाइंडिंग की सिंक्रोनस स्पीड (
) निम्नलिखित समीकरण से प्राप्त होती है
जहां,
f = हर्ट्ज में एसी उत्तेजना की आवृत्ति (हर्ट्ज)
P = स्टेटर पर डंडे की संख्या
- यहाँ हम देख सकते हैं कि
2 चर का एक कार्य है - 1। आवृत्ति और 2। स्टेटर पोल। - एक स्टेटर पर डंडे गैर-चर हैं क्योंकि कोई भी पहले से मौजूद मोटर में डंडे को आसानी से जोड़ या हटा नहीं सकता है
- इसलिए, एकमात्र चर जिसे हम वास्तविक रूप से बदल सकते हैं, वह है आपूर्ति की आवृत्ति
- नाम के रूप में VFD का सुझाव है कि उस गति में बदलाव के बारे में आवृत्ति अलग -अलग होगी जिस पर घूर्णन चुंबकीय क्षेत्र घूमेगा
- मोटर शुरू करने के लिए VFD का उपयोग करते समय, शुरू में आवृत्ति को गति में रोटर सेट करने के लिए जितना संभव हो उतना कम सेट किया जाएगा, एक बार रोटर गति में है, VFD धीरे -धीरे आवृत्ति बढ़ाएगा
- इससे
(सिंक्रोनस स्पीड) भी धीरे -धीरे बढ़ेगा - VFD अधिकतम आवृत्ति और गति सीमा तक पहुंचने तक आवृत्ति बढ़ता रहेगा
अनिच्छा
- यह इलेक्ट्रॉनों के प्रवाह में पाए जाने वाले विद्युत प्रतिरोध के अनुरूप है।
- इसके समान, एक माध्यम के माध्यम से यात्रा करते समय एक चुंबकीय प्रवाह चेहरे का प्रतिरोध अनिच्छा कहा जाता है।
- इसके माप के लिए एसआई इकाई हेनरी (एच) है
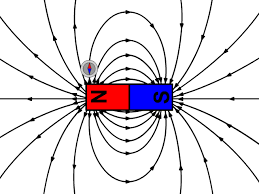
- कोई आसानी से अनिच्छा पथ देख सकता है जब कोई लोहे की छीलन को गिराता है/कागज की एक सपाट सफेद शीट पर फाइलिंग करता है और फिर उस पर एक चुंबक रखें। लोहे के कण हमेशा नीचे दिखाए गए अनुसार एक विशेष आकार बनाने के लिए खुद को पुनर्व्यवस्थित करेंगे।
- विभिन्न सामग्रियों के लिए अनिच्छा मूल्य अलग -अलग हैं।
- कम से कम अनिच्छा का मार्ग वह जगह है जहां चुंबकीय प्रतिरोध बहुत कम पाया जाता है। अधिक प्रवाह घनत्व यहां पाया जाएगा क्योंकि यह चुंबकीय लाइनों के माध्यम से गुजरने के लिए सबसे आसान रास्ता है
- उच्च अनिच्छा वाले पथ में इसलिए कम चुंबकीय प्रवाह घनत्व होगा।
- हवा और लोहे के मामले में, लोहे की अनिच्छा हवा से बहुत कम है, इसलिए चुंबकीय फ्लक्स लाइनें हवा के बजाय लोहे से गुजरना पसंद करेगी
मोटर तुलना
| मोटर प्रकार | दक्षता @ निरंतर आरपीएम | वर्तमान वृद्धि w/ टॉर्क (निरंतर आरपीएम) | वर्तमान वृद्धि w/ टोक़ (शीर्ष गति) | लागत | फ्लक्स घनत्व | टोक़ घनत्व | नियंत्रण जटिलता | मुख्य पेशेवरों | कुंजी विपक्ष | भारत में उदाहरण |
|---|---|---|---|---|---|---|---|---|---|---|
| ** PMSM ** (आंतरिक या सतह) | ⭐⭐⭐⭐ उच्च | रैखिक | घातीय | 💰💰💰 (उच्च - दुर्लभ पृथ्वी मैग्नेट) | ⭐⭐⭐⭐ (उच्च - मैग्नेट के कारण) | ⭐⭐⭐⭐ (उत्कृष्ट) | ⭐⭐⭐ (जरूरतों को फोक + रोटर स्थिति सेंसर) | उच्च दक्षता, महान टोक़, कॉम्पैक्ट | महंगा, मैग्नेट उच्च मंदिरों में गिरावट | टाटा नेक्सन ईवी, एमजी जेडएस ईवी |
| ** bldc ** (ट्रेपज़ोइडल) | ⭐⭐⭐ मॉडरेट -उच्च | STEP-WISE | खड़ी वृद्धि | 💰💰 (मॉडरेट) | ⭐⭐⭐ (अच्छा) | ⭐⭐⭐ (अच्छा) | ⭐ (सरल, हॉल-आधारित) | लागत-प्रभावी, प्रकाश ईवी के लिए अच्छा | टॉर्क रिपल, कम चिकनी | Ather 450x, OLA S1 |
| ** im ** (एसी इंडक्शन) | ⭐⭐ मध्यम | गैर-रैखिक (पर्ची पर निर्भर) | क्रमिक वृद्धि | 💰 (कम - कोई मैग्नेट नहीं) | ⭐⭐ (मध्यम, क्षेत्र-उन्मुख) | ⭐⭐ (लो -मेडियम) | ⭐⭐⭐⭐ (प्रसिद्ध नियंत्रण) | बीहड़, सस्ता, कोई मैग्नेट नहीं | कम कुशल, भारी | महिंद्रा एवरिटो, पुराने टेस्ला मॉडल |
| ** SRM ** (स्विच किए गए अनिच्छा) | ⭐⭐ मध्यम | अचानक/गैर-रैखिक | बहुत खड़ी | 💰 (बहुत कम) | ⭐⭐ (डिजाइन पर निर्भर करता है) | ⭐ (कम) | ⭐⭐⭐⭐ (अत्यधिक जटिल, उच्च आवृत्तिनियंत्रण) | सरल निर्माण, कोई मैग्नेट नहीं | शोर, टॉर्क रिपल, ईएमआई मुद्दे | प्रोटोटाइप/आर एंड डी, वाणिज्यिक 3W |
| ** SYNRM ** (सिंक्रोनस अनिच्छा) | ⭐⭐⭐ उच्च | चिकनी, हल्के गैर-रैखिक | खड़ी | 💰💰 (कोई मैग्नेट नहीं, लेकिन विशेष रोटर डिजाइन की जरूरत है) | ⭐⭐ (मॉडरेट) | ⭐⭐ (पीएमएसएम से कम) | ⭐⭐⭐⭐ (FOC + ROTOR स्थिति अनुमान) | चुंबक-मुक्त, कुशल | लोअर पीक टॉर्क, अभी भी उभर रहा है | हुंडई आर एंड डी, फ्यूचर ईयू/इंडिया टेक |
दंतकथा:
-
⭐ = रेटिंग (1-4)
-
💰 = सापेक्ष लागत
-
FOC = फील्ड-ओरिएंटेड कंट्रोल
-
ईएमआई = विद्युत चुम्बकीय हस्तक्षेप
ईवी मोटर प्रकार तुलना तालिका
| पैरामीटर | स्थायी चुंबक सिंक्रोनस मोटर (PMSM) | स्विच किए गए अनिच्छा मोटर (SRM) | सिंक्रोनस अनिच्छा मोटर (SYNRM) | ब्रशलेस डीसी मोटर (BLDC) | एसी इंडक्शन मोटर (IM) |
|---|---|---|---|---|---|
| ऑपरेटिंग सिद्धांत | रोटर और सिंक्रनाइज़ स्टेटर फील्ड पर स्थायी मैग्नेट का उपयोग करता है | स्विच किए गए वाइंडिंग के साथ रोटर सामर्थ्य और अनिच्छा टोक़ का उपयोग करता है | अनिच्छा टोक़ उत्पन्न करने के लिए रोटर सामर्थ्य का उपयोग करता है | ट्रेपोज़ॉइडल कम्यूटेशन के साथ स्थायी मैग्नेट का उपयोग करता है | गिलहरी पिंजरे या घाव रोटर के साथ विद्युत चुम्बकीय प्रेरण का उपयोग करता है |
| दक्षता | बहुत उच्च ~ 95% | मॉडरेट (85-90%) | उच्च ~ 90%) | उच्च ~ 90%) | मध्यम ~ 85%) |
| टॉर्क घनत्व | उच्च | मध्यम | मध्यम | उच्च | मध्यम |
| पीक पावर घनत्व | उच्च | मध्यम | मध्यम | उच्च | मध्यम |
| लागत | दुर्लभ पृथ्वी मैग्नेट के कारण महंगा | दुर्लभ पृथ्वी सामग्री की अनुपस्थिति के कारण कम | कोई मैग्नेट के कारण पीएमएसएम से कम | मध्यम | कम (परिपक्व प्रौद्योगिकी के कारण) |
| विश्वसनीयता और स्थायित्व | उच्च, लेकिन demagnetization का जोखिम | बहुत अधिक, मजबूत संरचना | उच्च, लेकिन कम थर्मल सीमा | उच्च, लेकिन सटीक नियंत्रण की आवश्यकता है | बहुत अधिक, सिद्ध तकनीक |
| किसी दिए गए आरपीएम पर खपत | सबसे कम, उच्च दक्षता और निरंतर क्षेत्र के कारण | हिस्टैरिसीस और स्विचिंग लॉस के कारण उच्चतर | मध्यम, डिजाइन अनुकूलन पर निर्भर करता है | कम से कम मध्य गति लेकिन उच्च आरपीएम पर बढ़ सकते हैं | स्लिप लॉस के कारण उच्चतर |
| बढ़ती गति पर वर्तमान बनाम टोक़ | रैखिक वृद्धि, क्षेत्र कमजोर होने की क्षतिपूर्ति के रूप में | कम गति पर nonlinear, उच्च वर्तमान ड्रा | रैखिक लेकिन उच्च गति पर संतृप्ति प्रभाव के साथ | रैखिक वृद्धि लेकिन उच्च आरपीएम पर दक्षता कम हो जाती है | पर्ची वृद्धि के कारण उच्च गति पर घातीय |
| शीर्ष गति पर वर्तमान बनाम टोक़ | क्षेत्र कमजोर होने के कारण घातीय वृद्धि | अक्षमताओं को स्विच करने के कारण घातीय वृद्धि | अनिच्छा के नुकसान के कारण मध्यम वृद्धि | वापस ईएमएफ प्रभाव के कारण घातीय वृद्धि | पर्ची और गर्मी के नुकसान के कारण उच्चतम वृद्धि |